
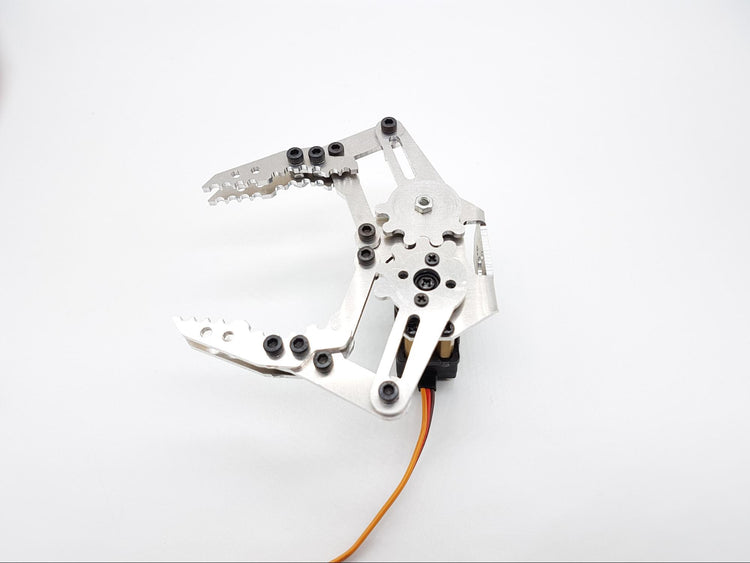
Mechanical Gripper for Robot Arm with MG996R Servo
Components Required:
Software Required:
In this tutorial, we will learn how to make a mechanical claw for your robotic arm. We are using the MG99R metal servo, to control the claw, which is perfect for handling rigorous tasks. Weighing only 60 grams, and providing a maximum angular spacing of 50mm (5cm), this can be used for a wide variety of applications.
Step wise Assembly:











Upload and Run the Code
Connect the Arduino to the computer using the USB Cable.
Open Arduino IDE software
Select the appropriate board under Tools > Board
Select the appropriate Serial Port under Tools > Port
Here is an example code that you can upload. It will open and close the claw periodically after 1 second. Calibrate the open and close angles of the mechanical claw by changing the appropriate angles in OpenClaw() and CloseClaw() functions.
Author: Nakul Garg
this iis gay go frick ur mommy