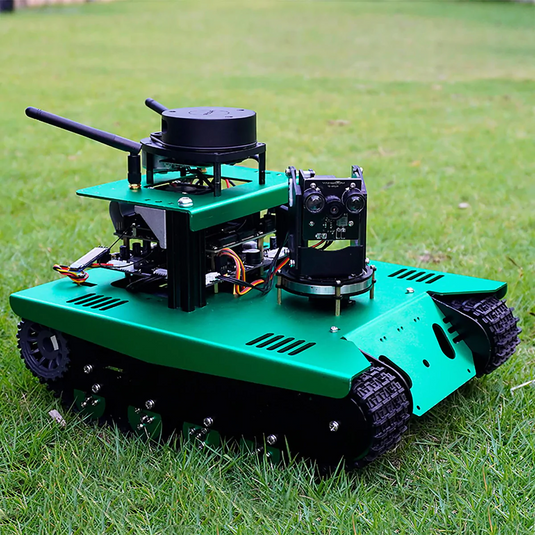








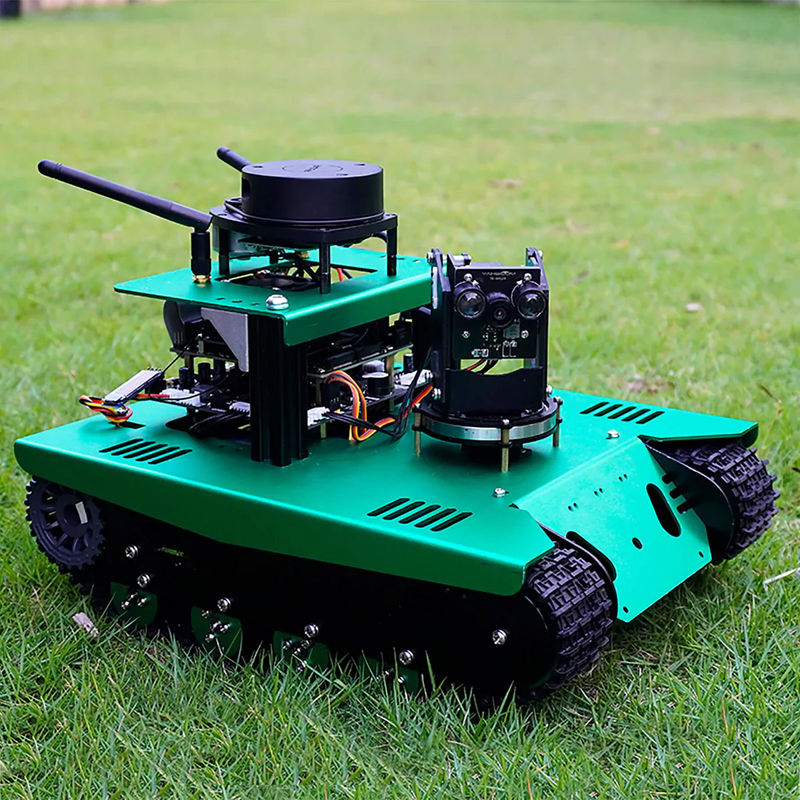



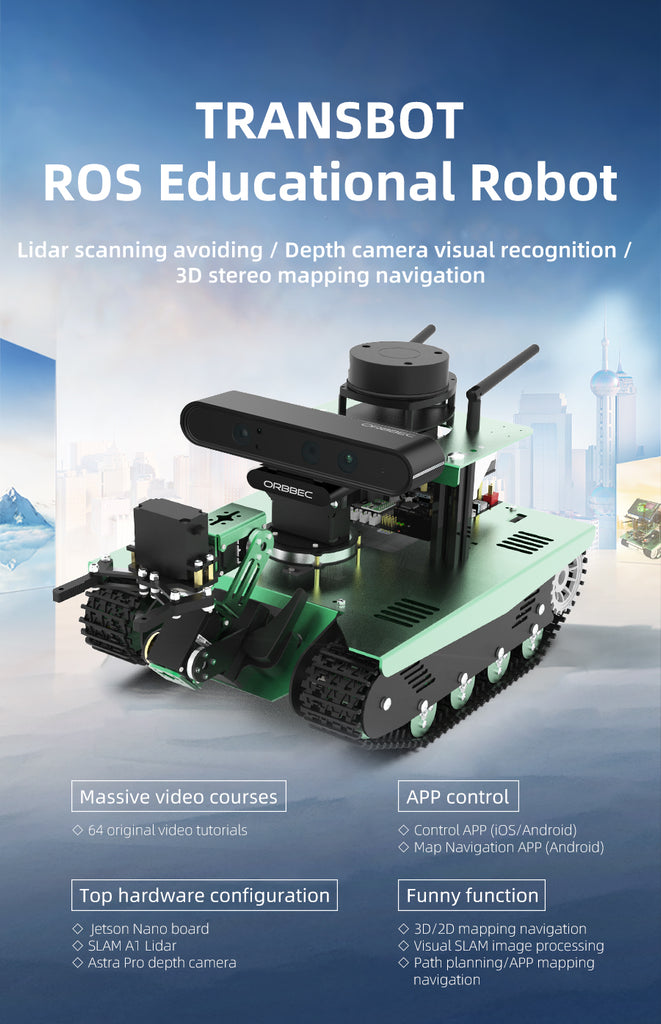
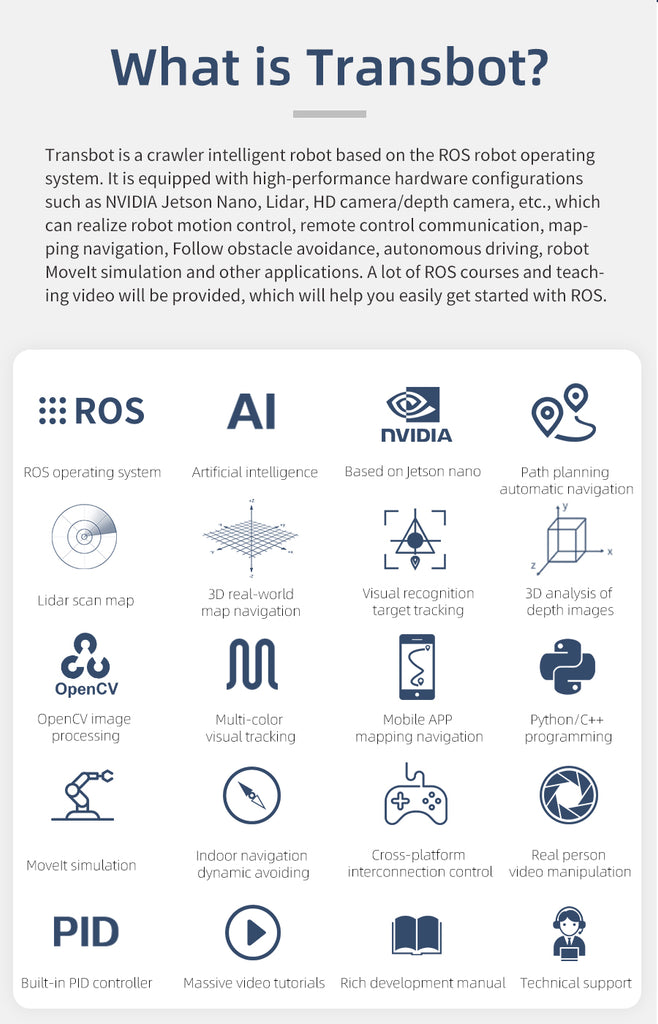
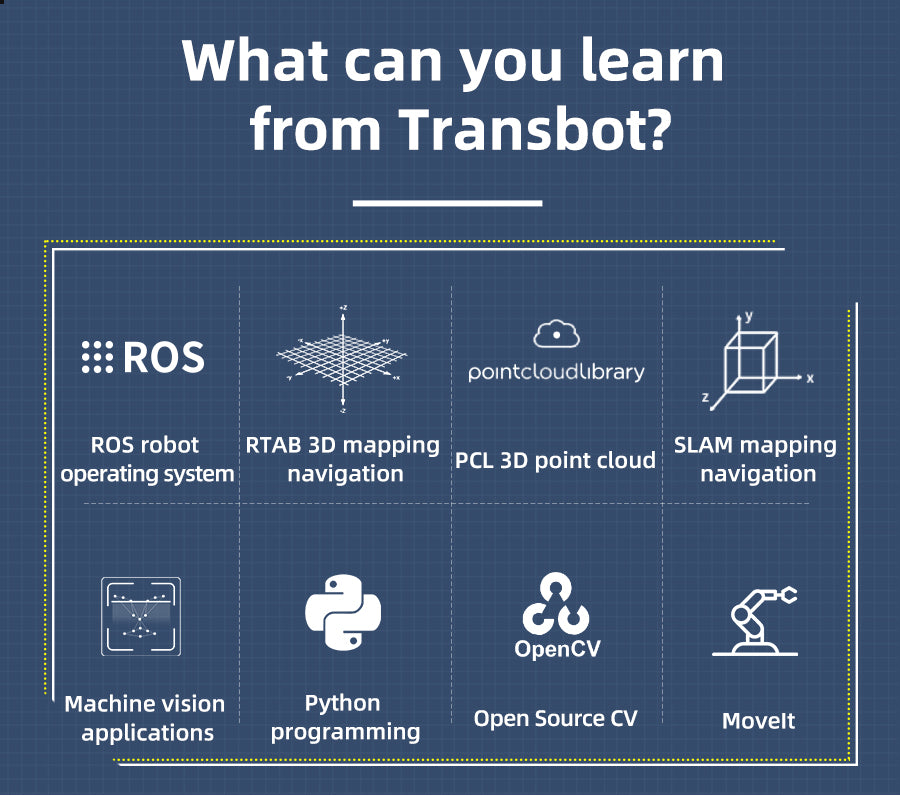
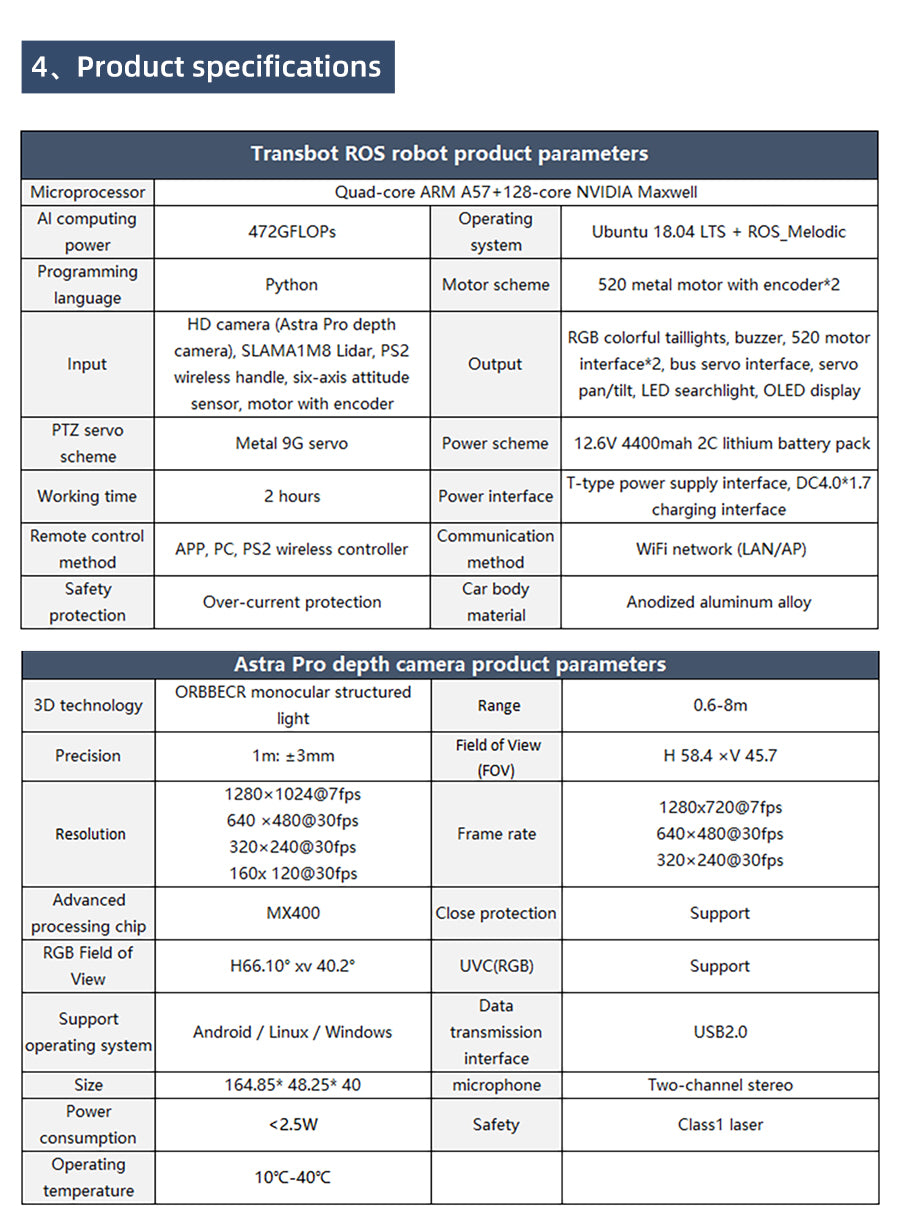
Transbot is a crawler off-road robot based on ROS(robot operating system) and Python programming, which is designed for ROS enthusiasts and robot players. It is equipped with high-performance hardware configurations such as Jetson NANO, Lidar, HD camera/depth camera, etc., which can realize applications such as robot motion control, remote communication, mapping navigation, following-avoiding, autopilot and robotic arm MoveIt simulation. A lot of teaching course documents and videos to help you get started with ROS easily.
SOME VARIANTS MAY HAVE A LEAD TIME OF 2-3 WEEKS.
Features
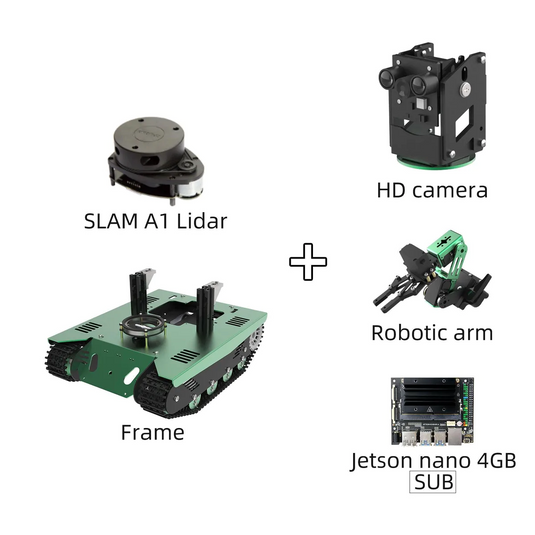
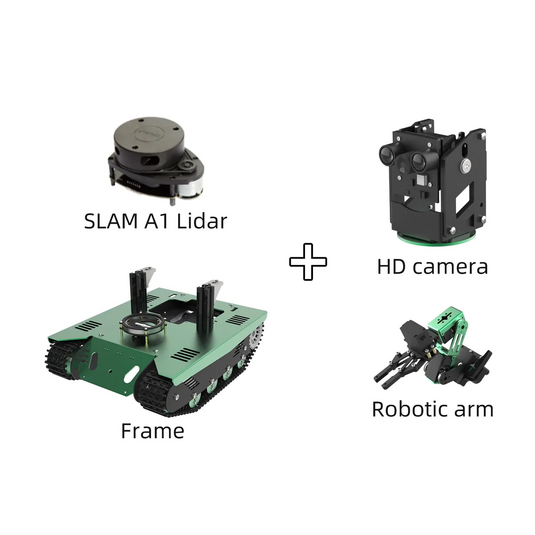
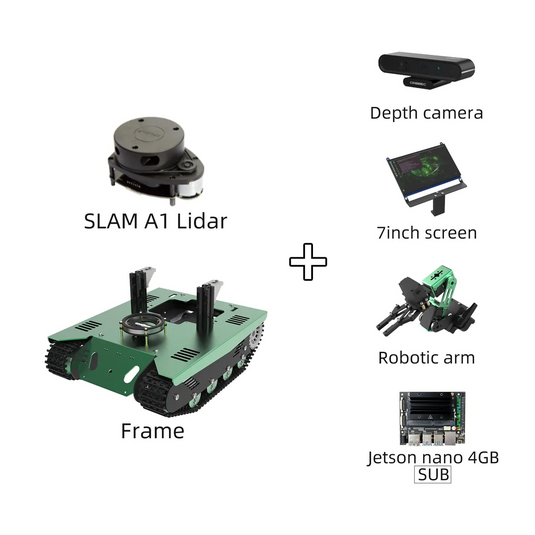
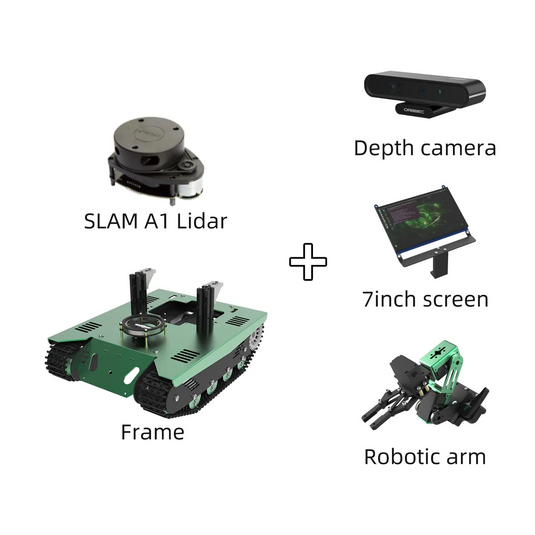
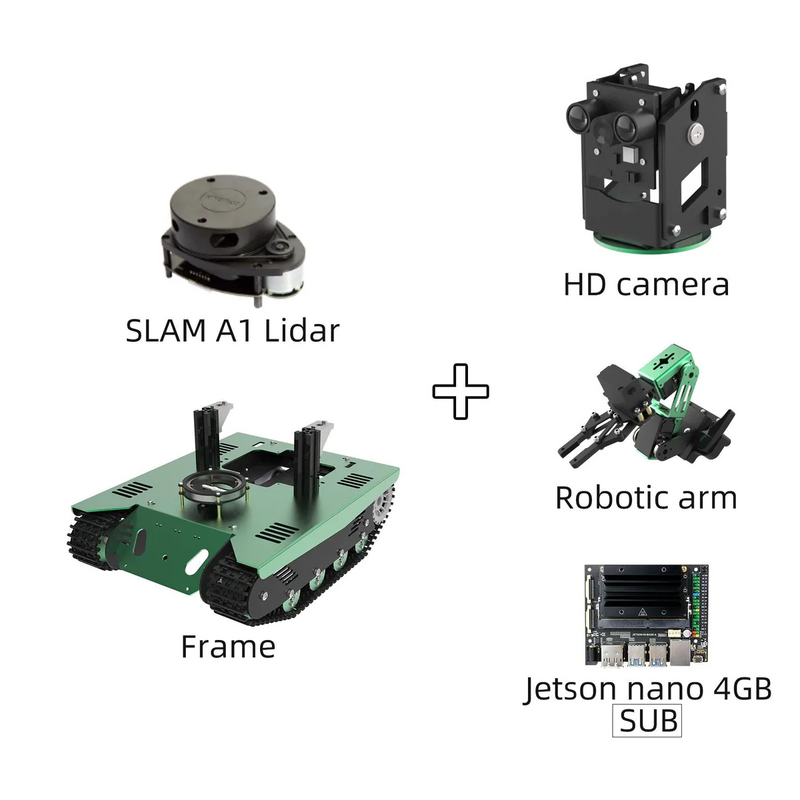
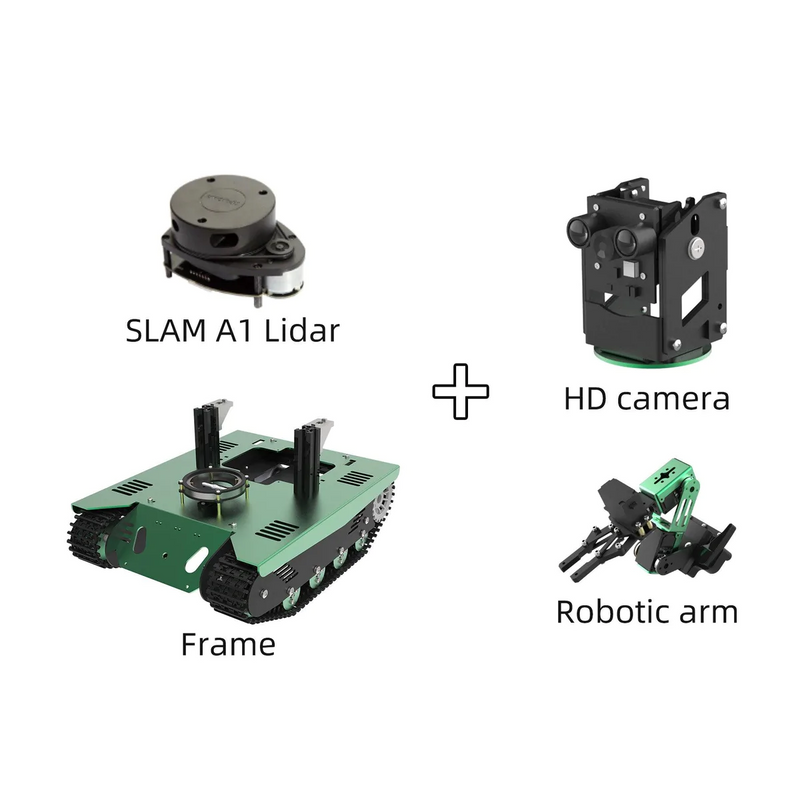
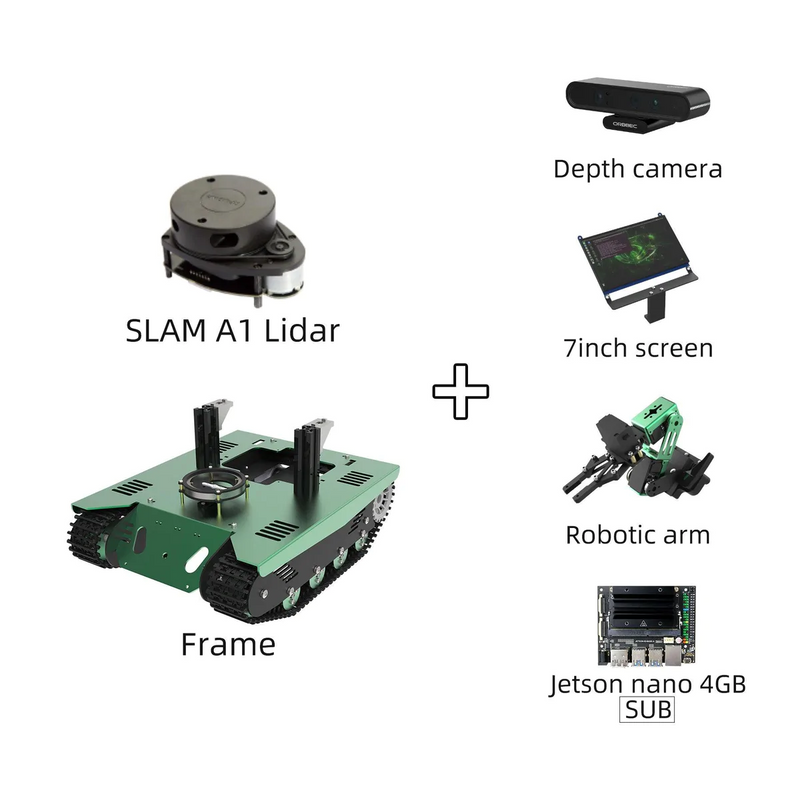
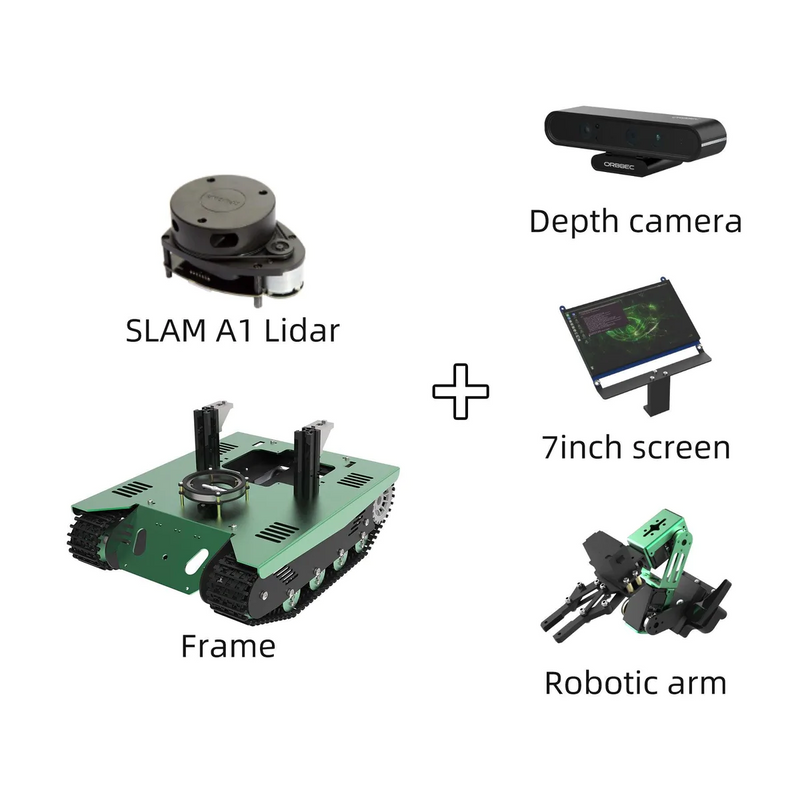
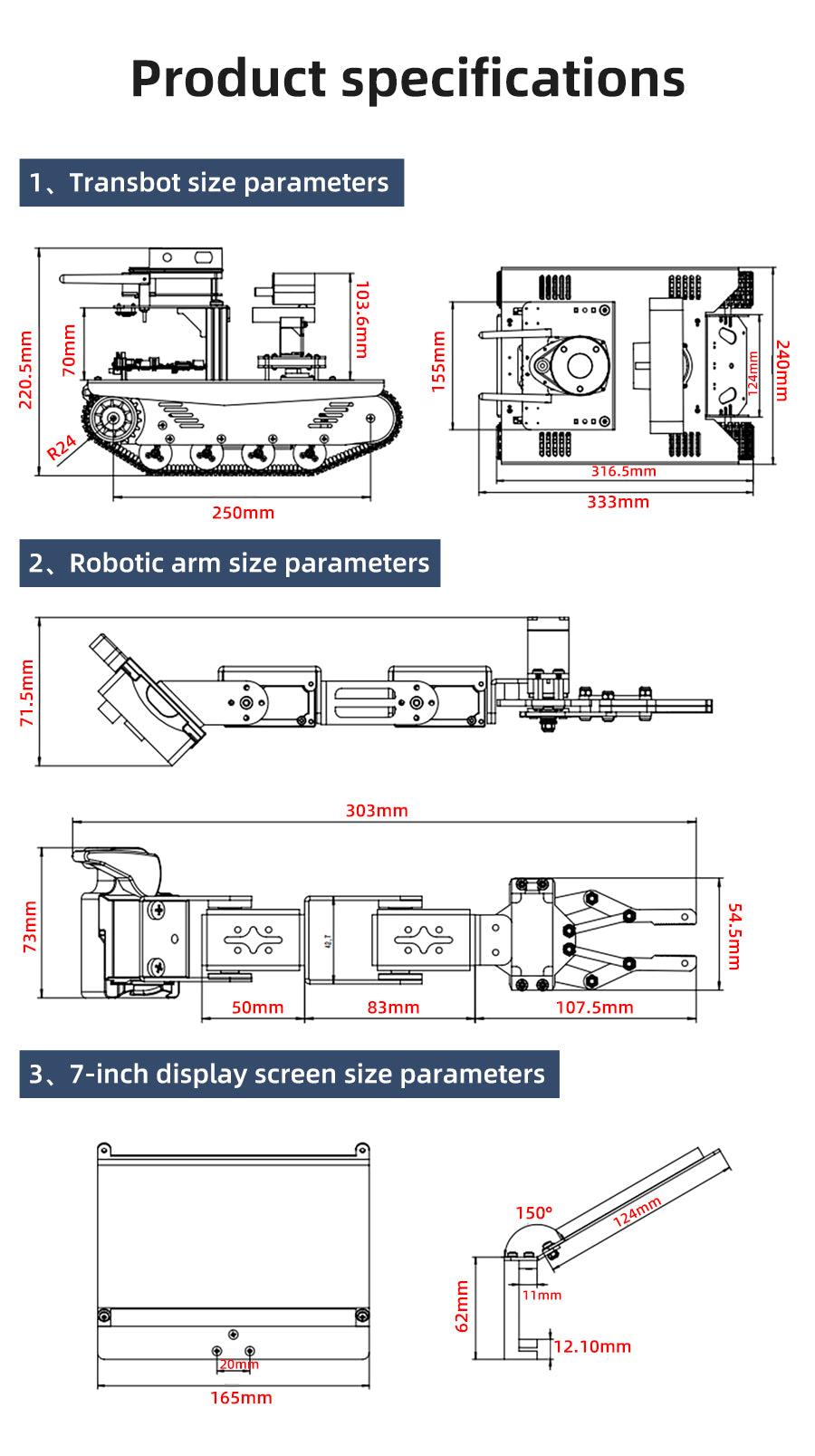
- Crawler style, support for quick assembly robotic arm: The whole car is made of green aluminum alloy oxide material, supports install robotic arm, 2DOF camera pan/tilt, 7-inch screen and so on. Users can debug the car anytime and anywhere.
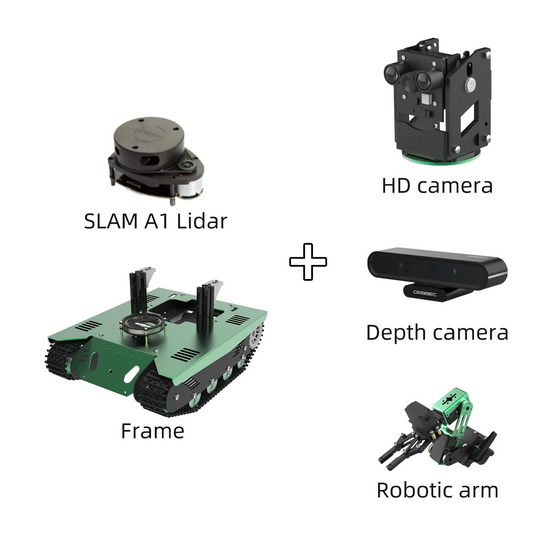
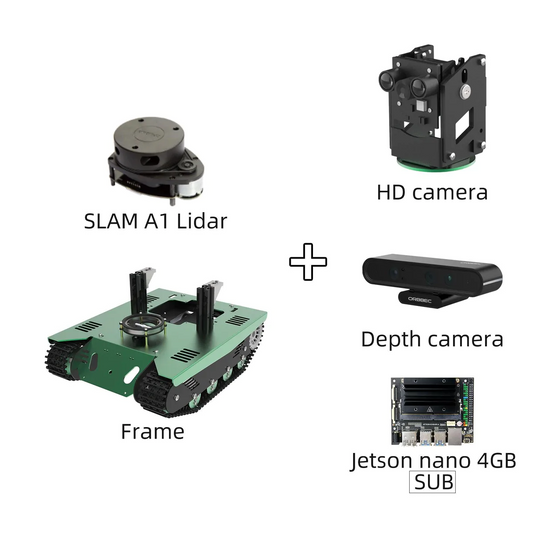
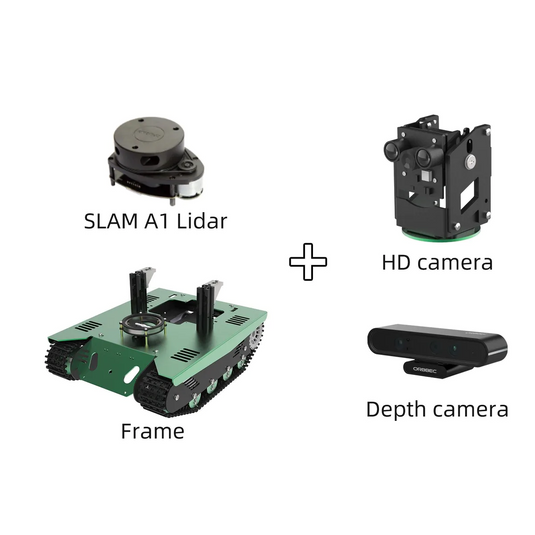
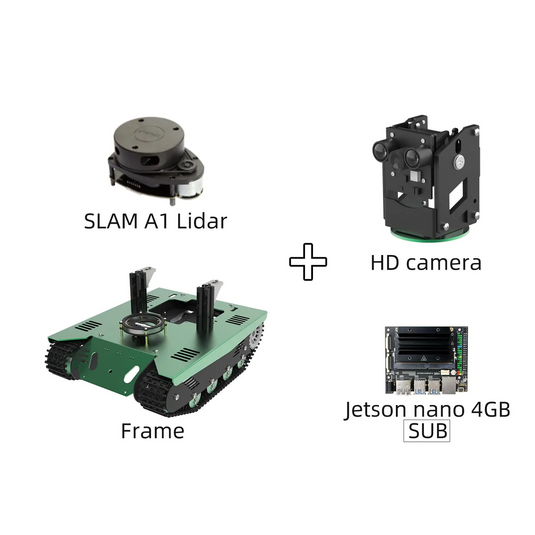
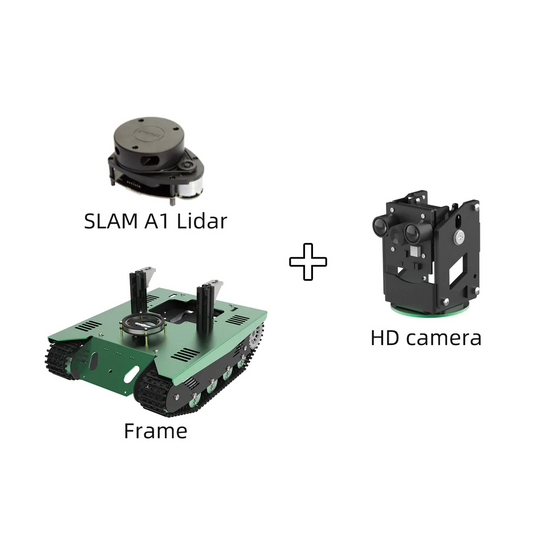
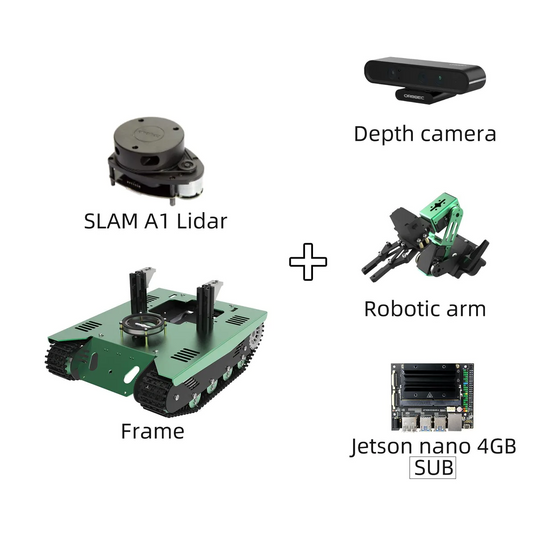
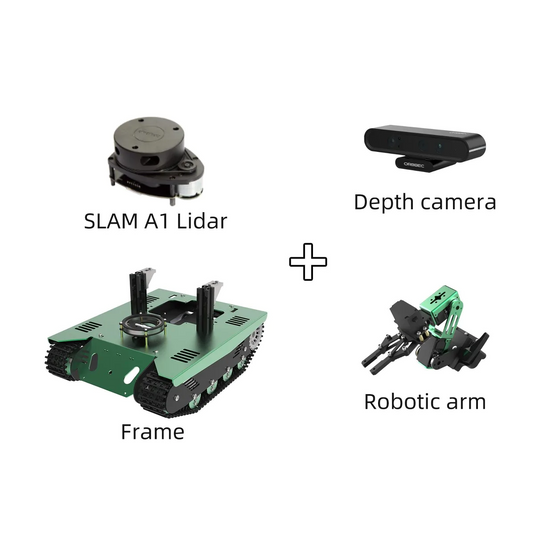
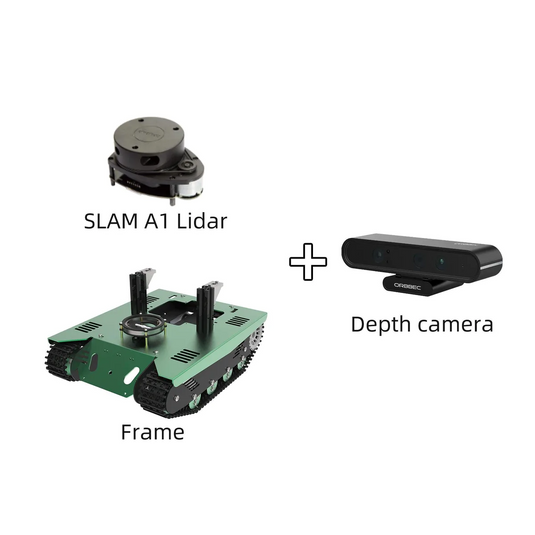
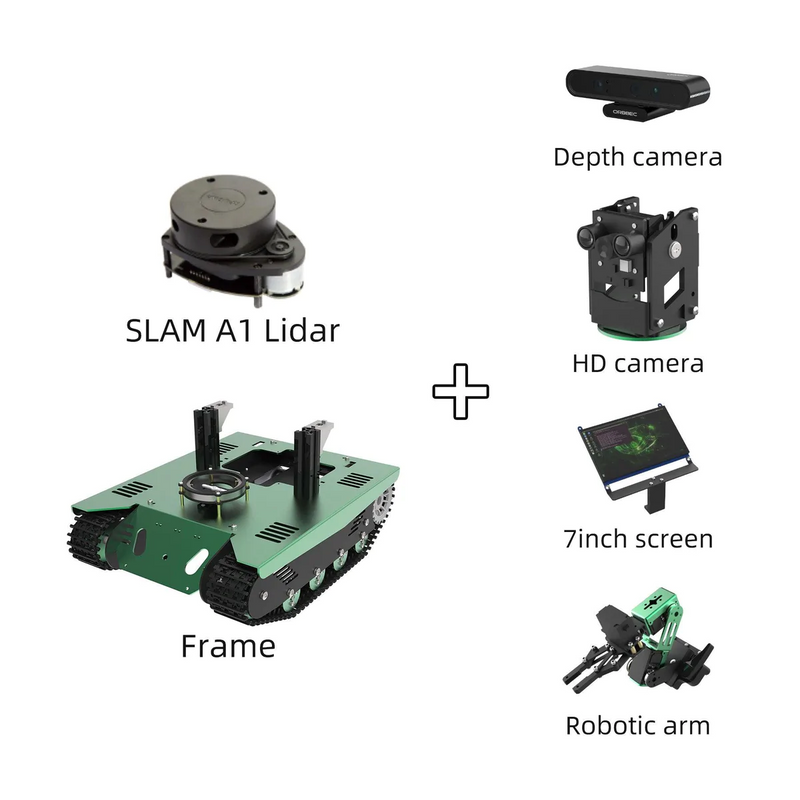
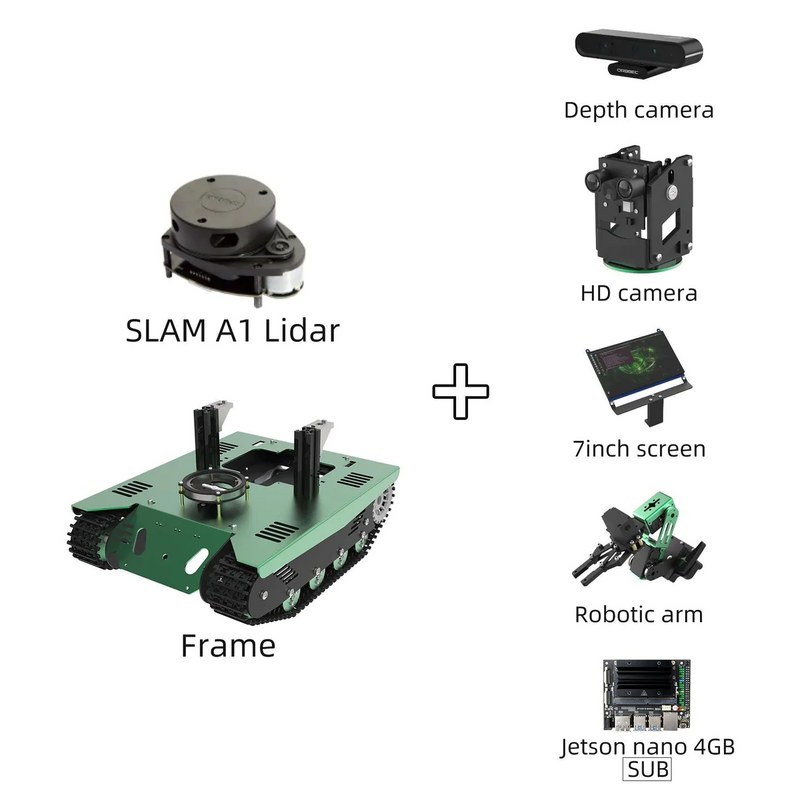
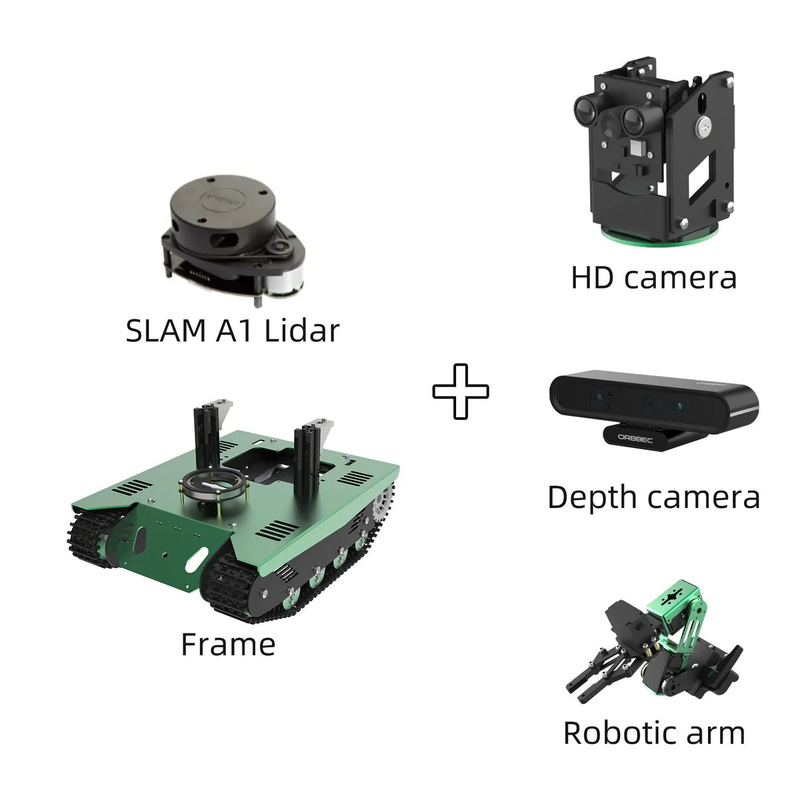
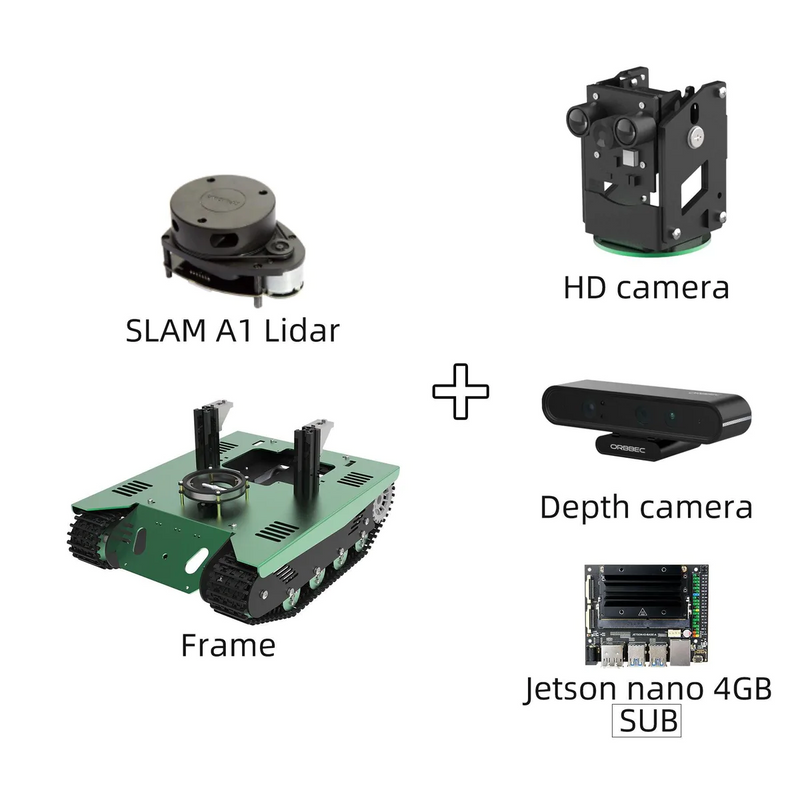
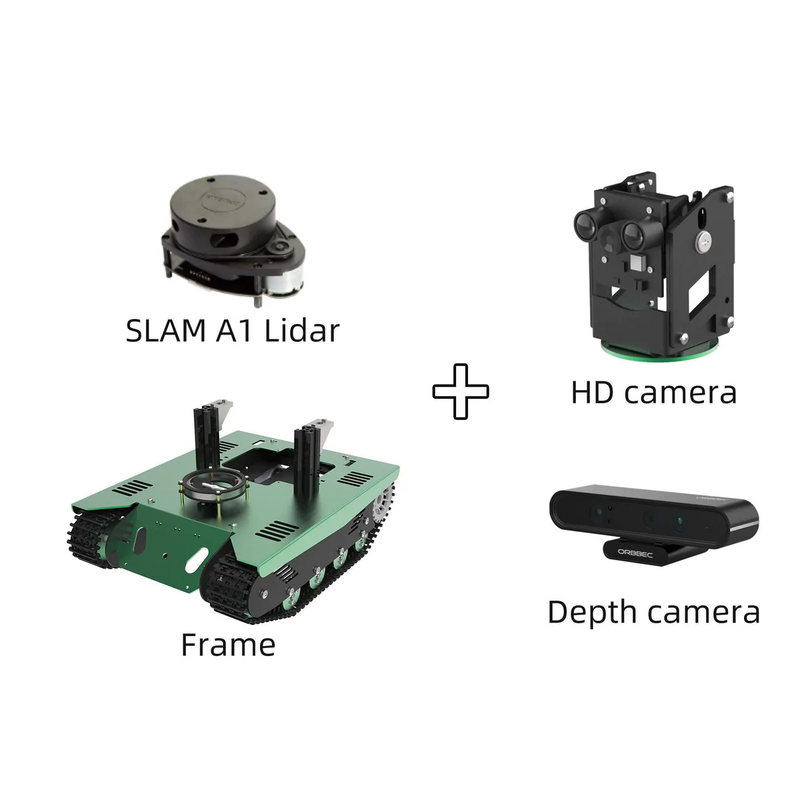
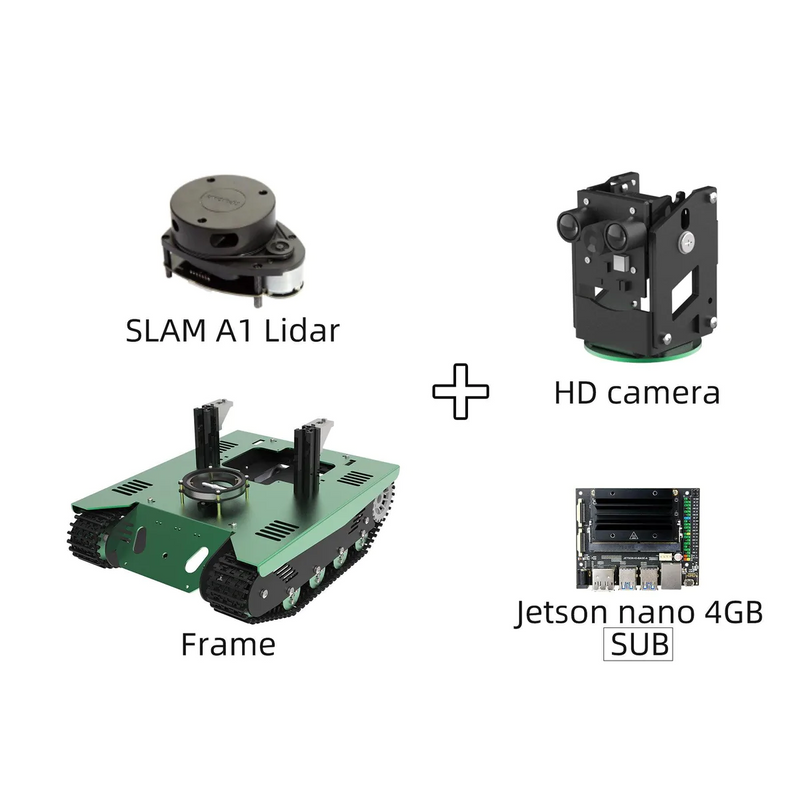
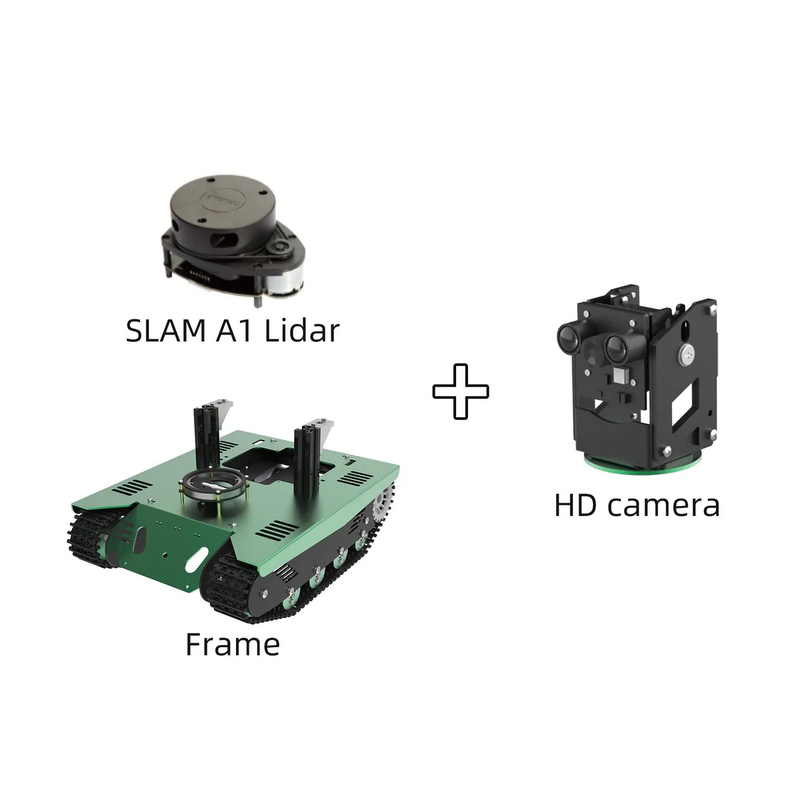
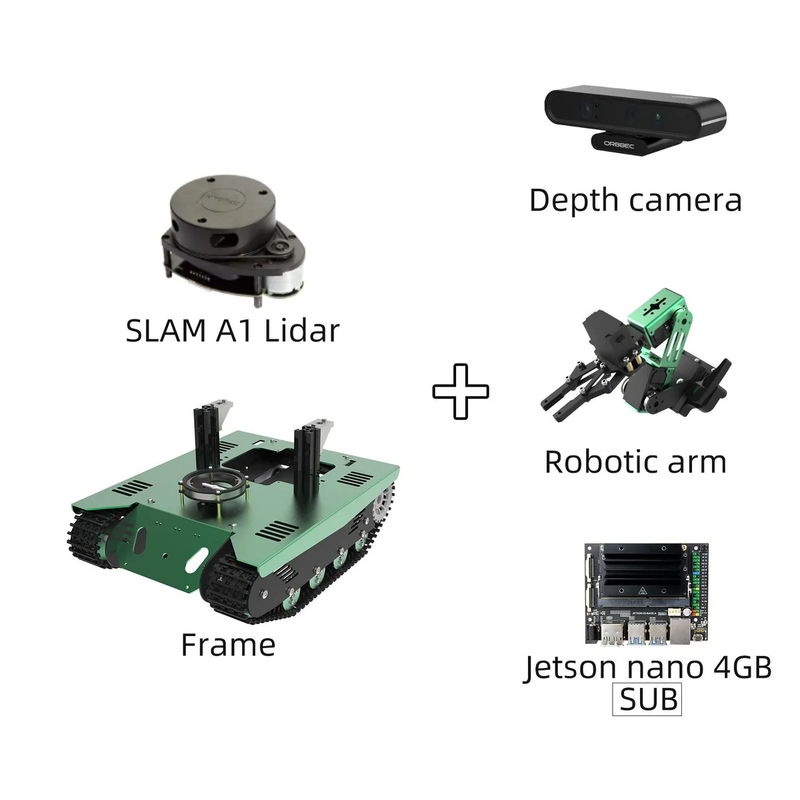
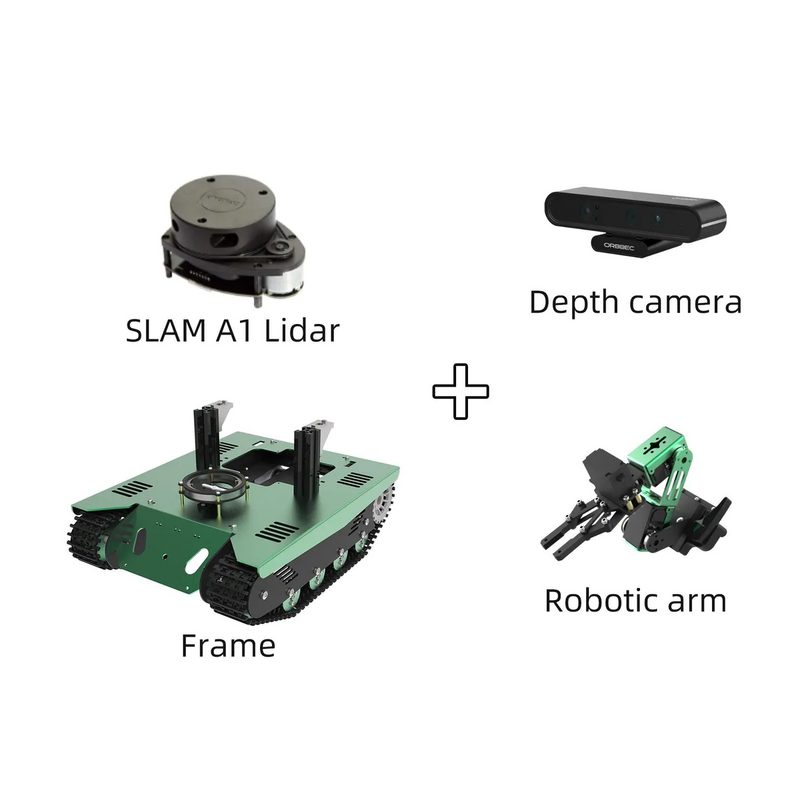
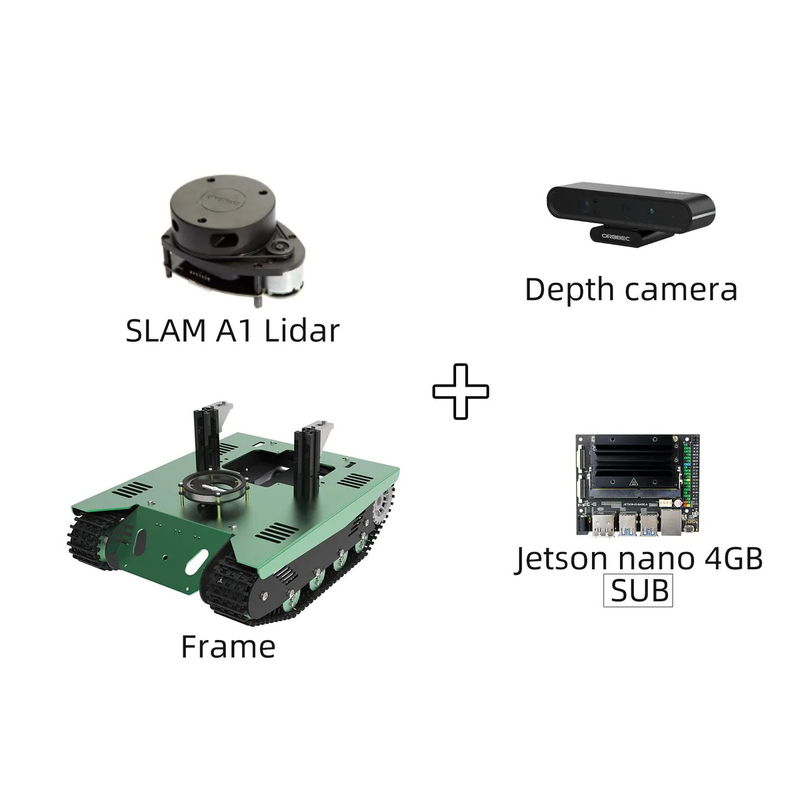
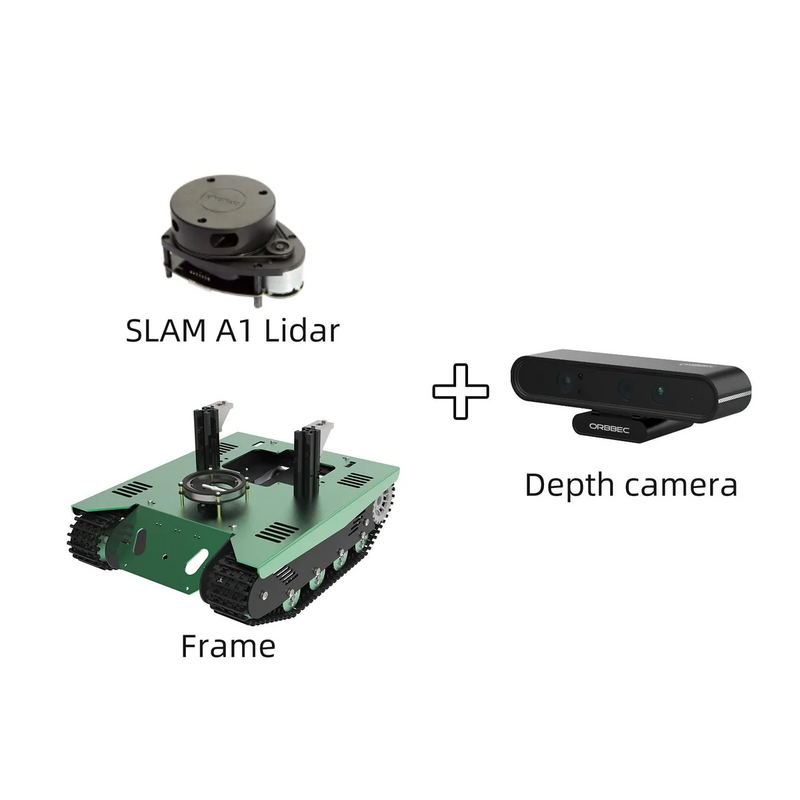
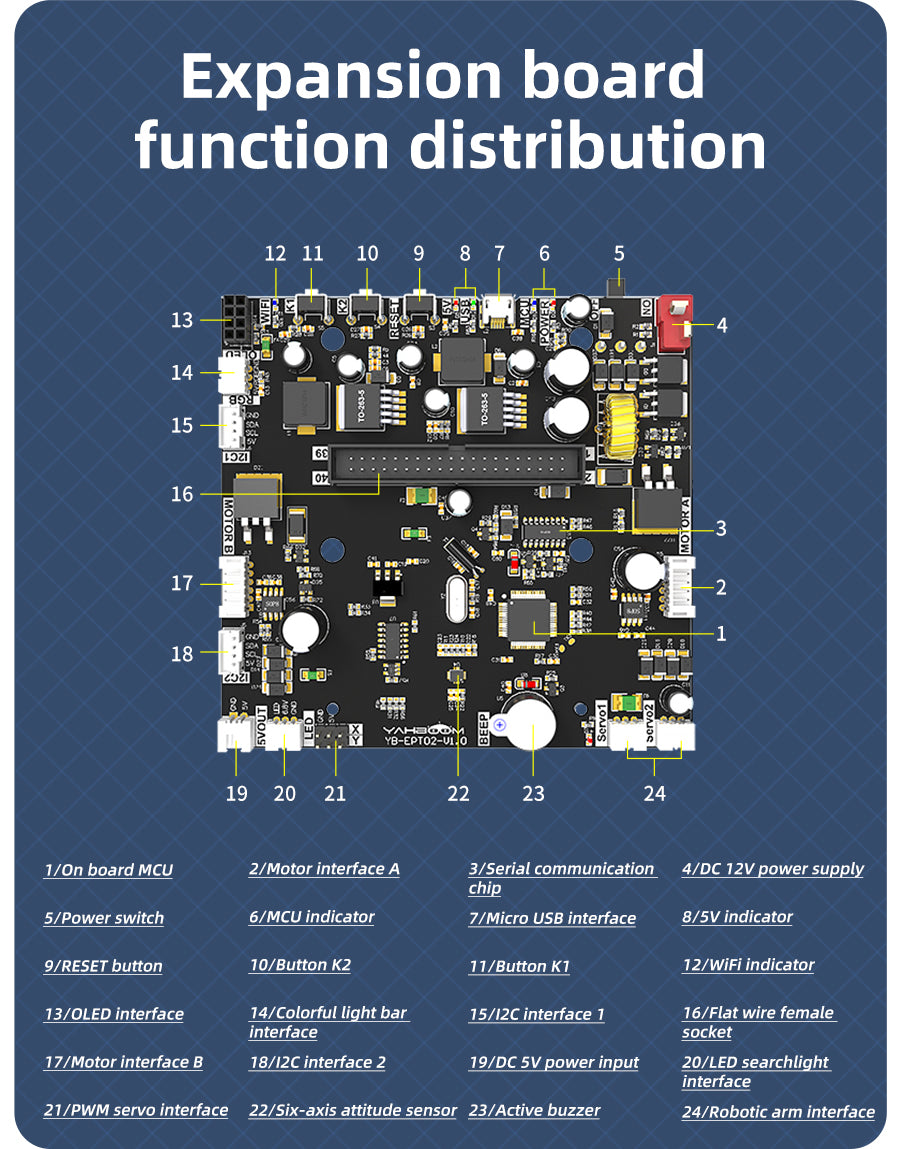
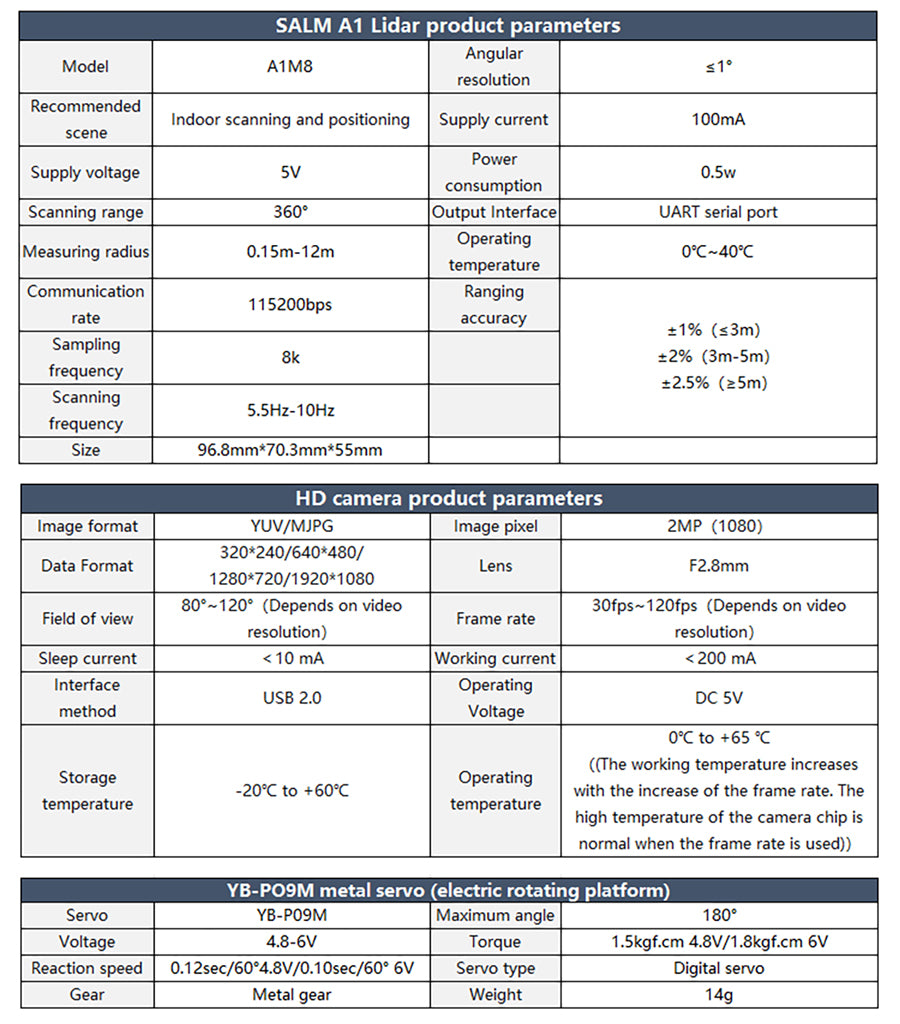
- Professional hardware configuration: SLAM lidar, HD camera/depth camera, powerful coding gear motor, metal servo, and Yaboom robot expansion board, etc.
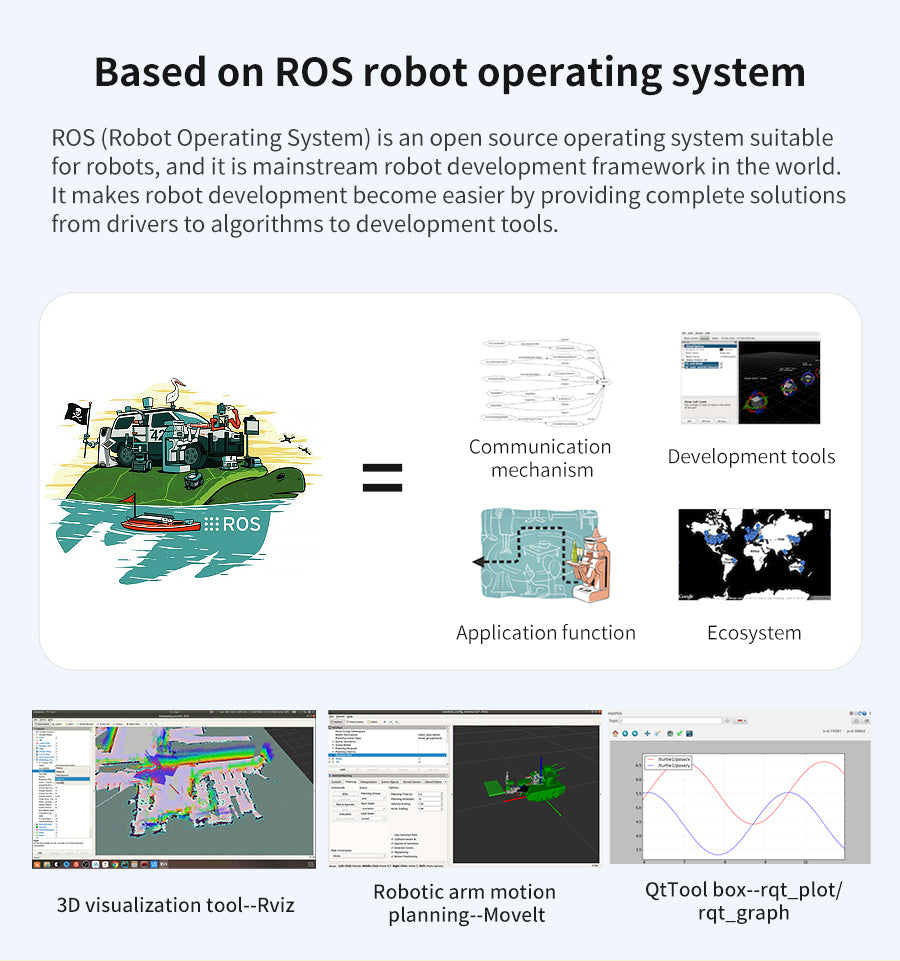
- Based on ROS (robot operating system) and Python programming: We cleverly used Rviz, Movelt, and Qt toolboxes in robot operating system to realize the joint control of the robotic arm Movelt simulation and the real machine.
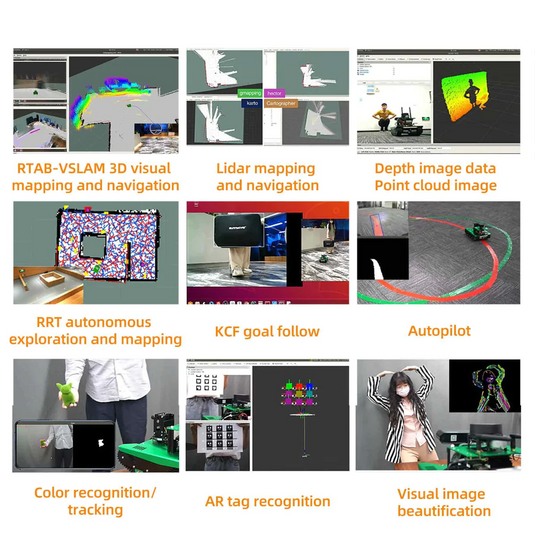
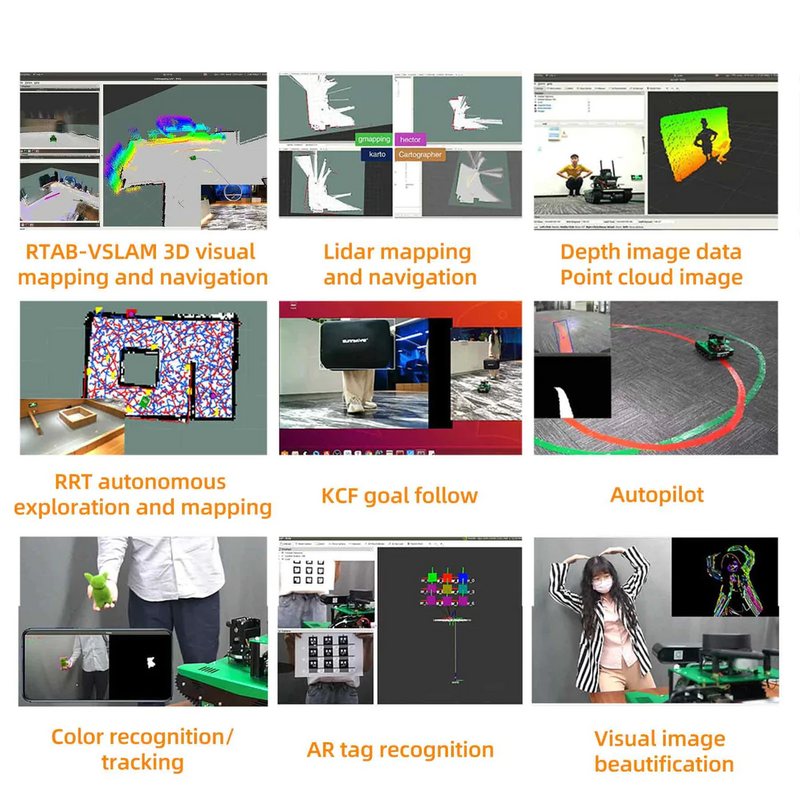
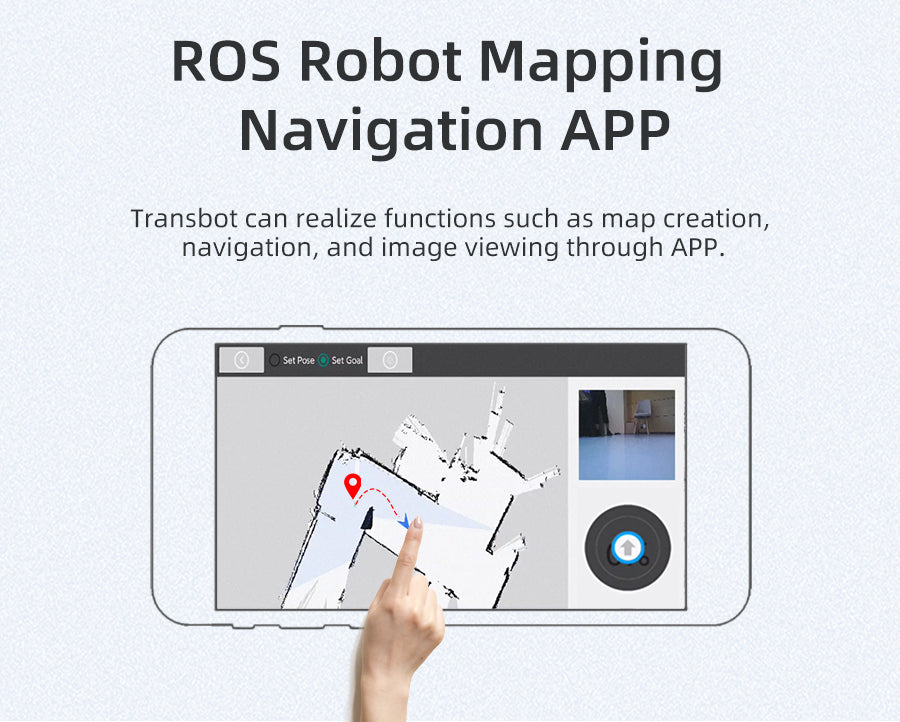
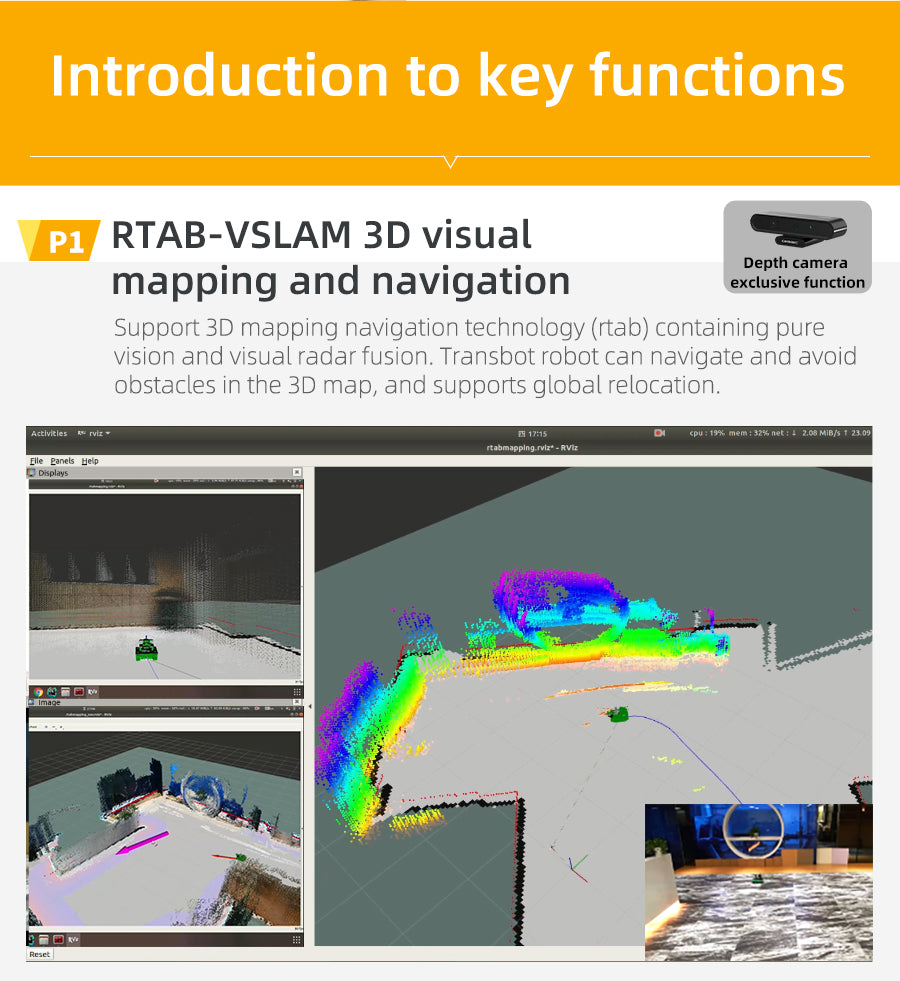
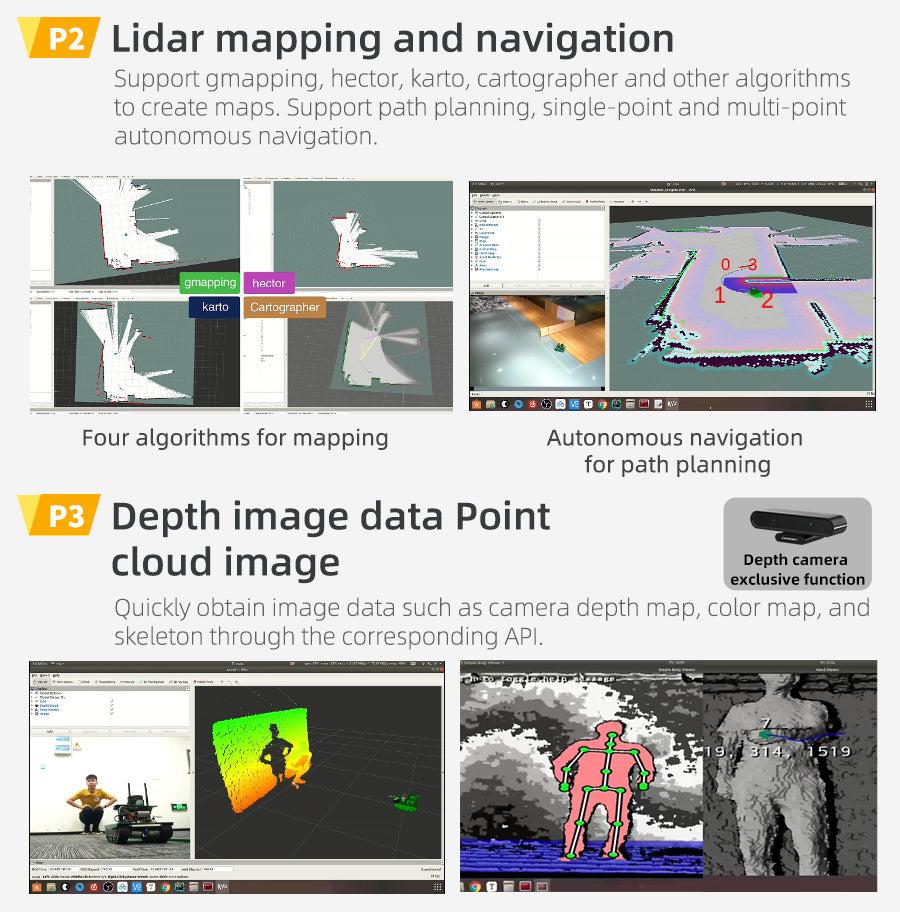
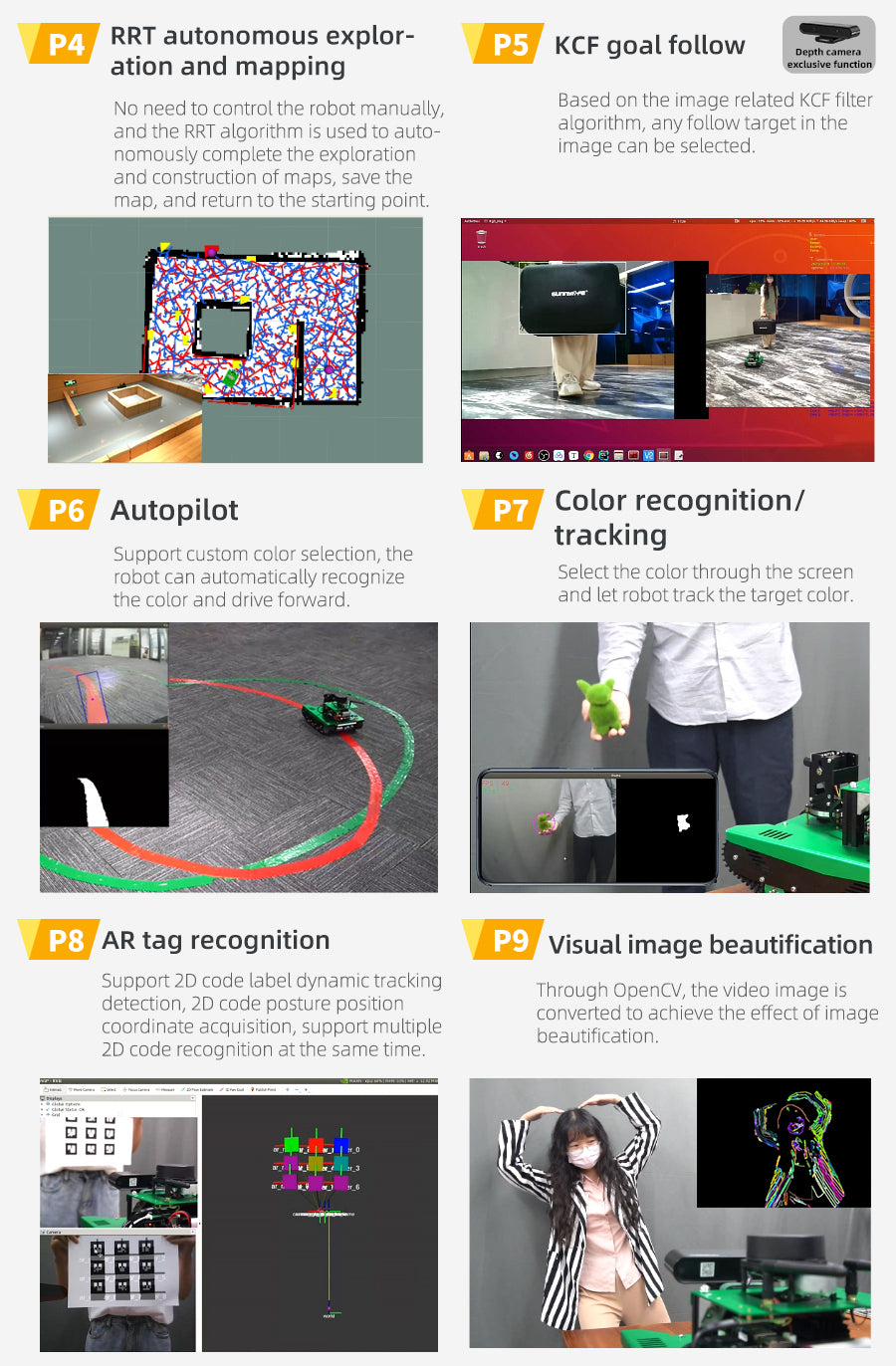
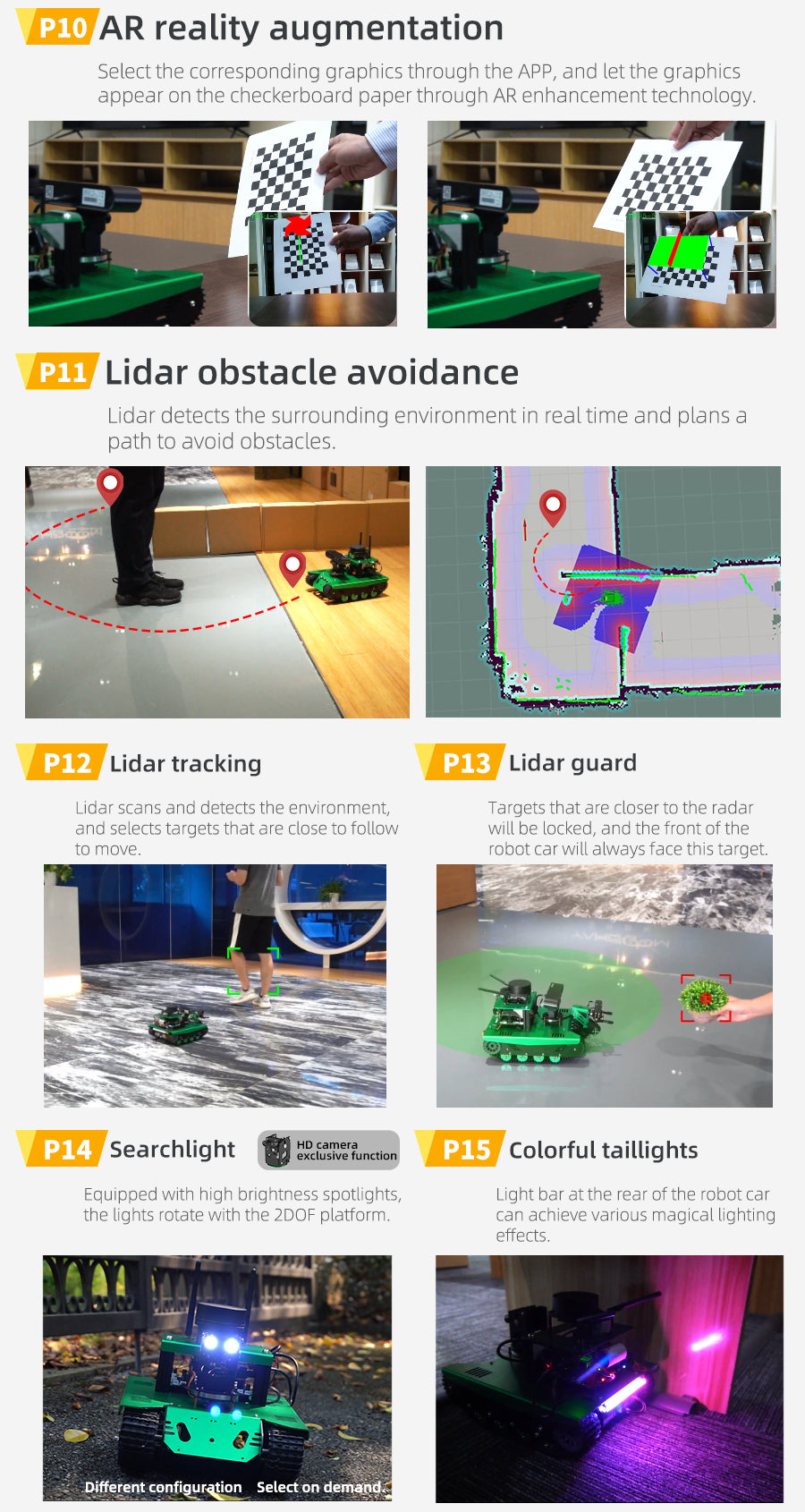
- Wonderful AI functions: Lidar avoiding, fixed-point navigation, bone detection, finger following, camera calibration, 3D visual mapping navigation, etc.
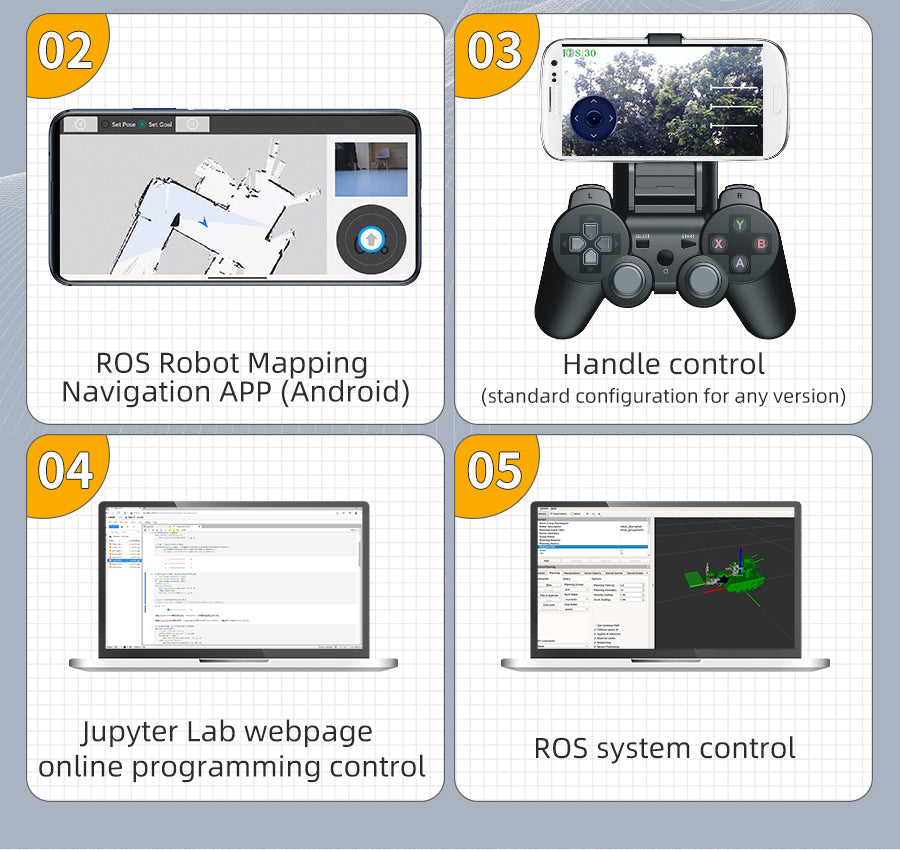
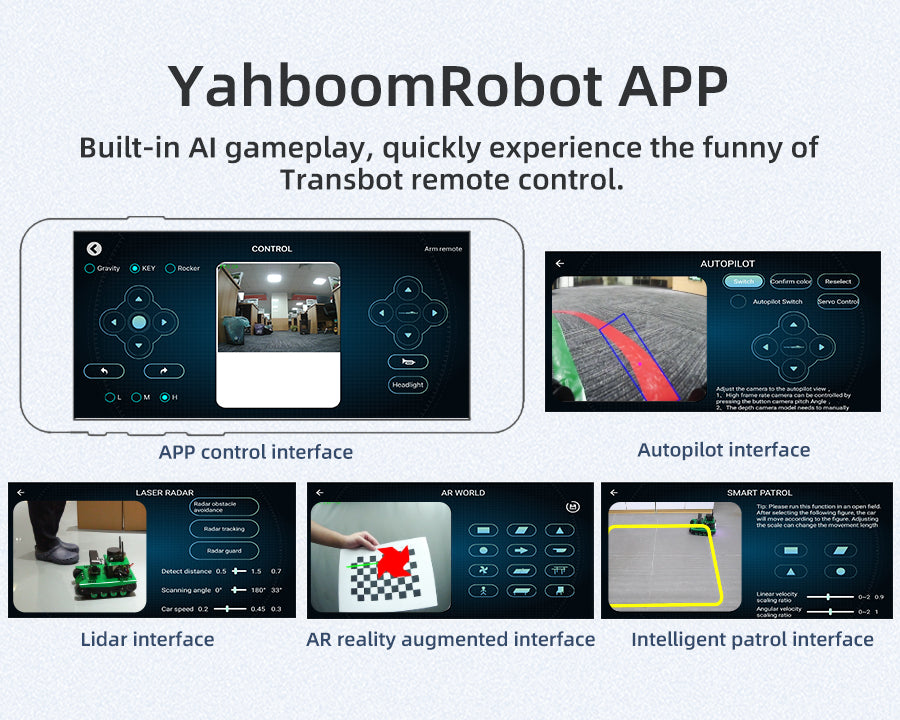
- Cross-platform interconnection control: Mobile remote control APP integrated with a variety of AI functions; handle control that can experience the FPV real-time visual effects; JupyterLab online programming and robot operating system control.
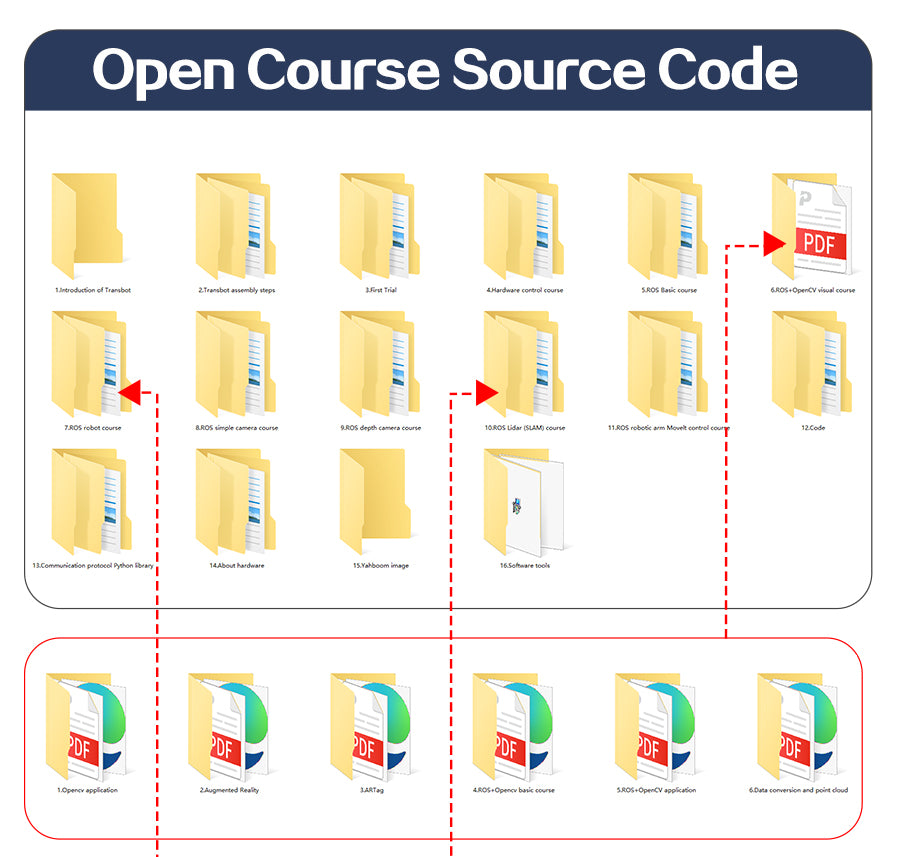
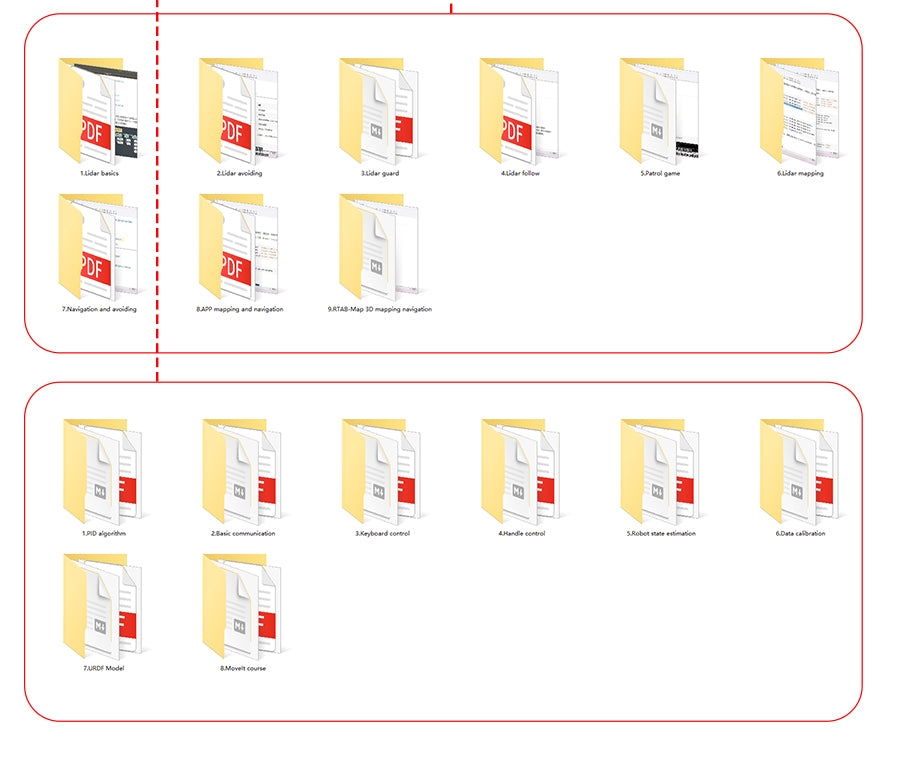
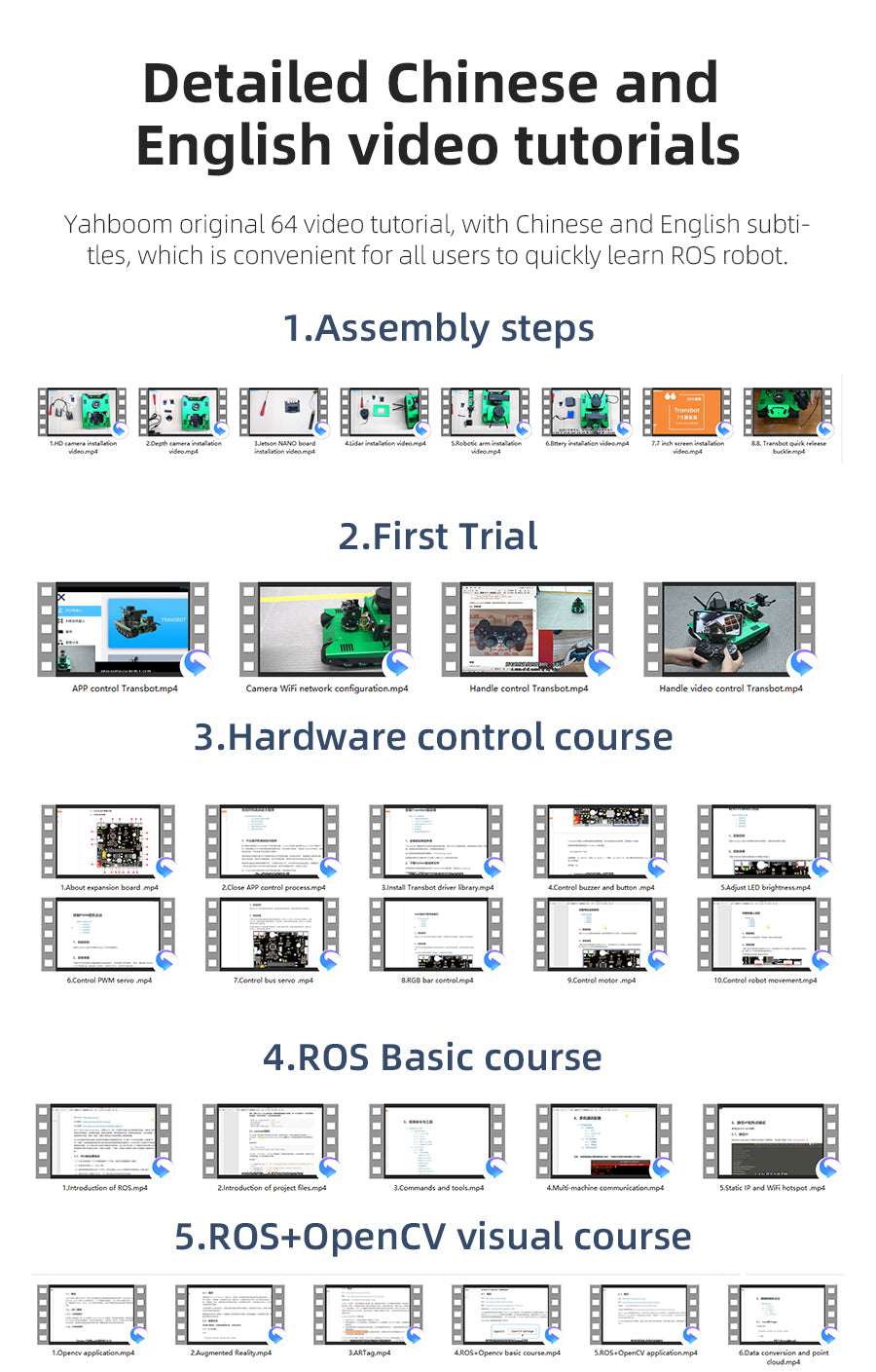
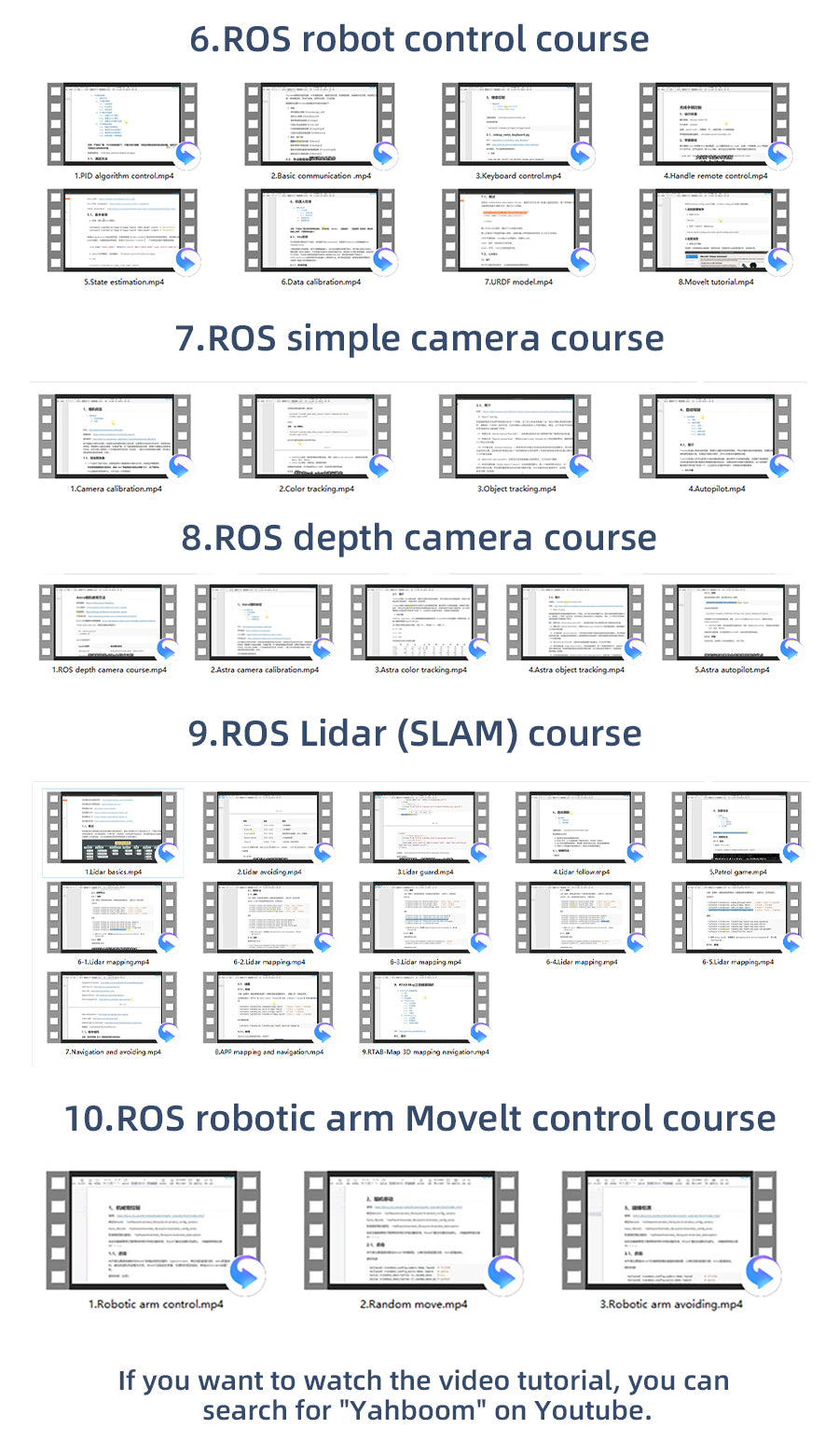
- Detailed video teaching courses: We provide 64 video tutorials and detailed documents. Whether you are a beginner or an experienced ROS player, you can easily use this robot.
Tutorial link
Yahboom Transbot ROS Educational Robot















Packing list